
2015
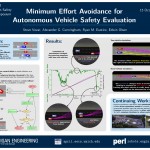
Minimum Effort Avoidance for Autonomous Vehicle Safety Evaluation (see full), presented at the UMTRI Transportation Safety Research Symposium in Ann Arbor, Michigan.
2014

Modeling Humans in the Teleoperated Robot System Loop (see full), presented at the 2014 NSF Cyber Physical Systems Young Professionals Workshop in Washington DC.
2013
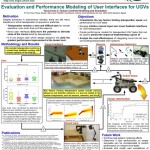
Evaluation and Performance Modeling of User Interfaces for UGVs (see full), presented at the19th Annual Automotive Research Center Program Review in Ann Arbor, Michigan.

Improving Teleoperated Robot Speed Using Optimization Techniques (see full), presented at the 8th Annual Human-Robot Interaction Conference in Tokyo, Japan.

Balance-Arm Tablet Computer Stand for Robotic Camera Control (see full), presented at the 8th Annual Human-Robot Interaction Conference in Tokyo, Japan.
2012

Improving Teleoperated Mobile Manipulator Performance (see full), presented at the 7th Annual Human-Robot Interaction Pioneers Workshop as a part of the 2012 Human-Robot Interaction Conference in Boston, MA.